Here are some cool new features. At least they’re cool if you already use AVT Alvium cameras and want to get even more out of them. Conversely the features may get your attention to give Alvium a look for your next application.
We call out five specific new features (or feature sets):
- Liquid lens autofocus controls – great for logistics applications: fast focus change
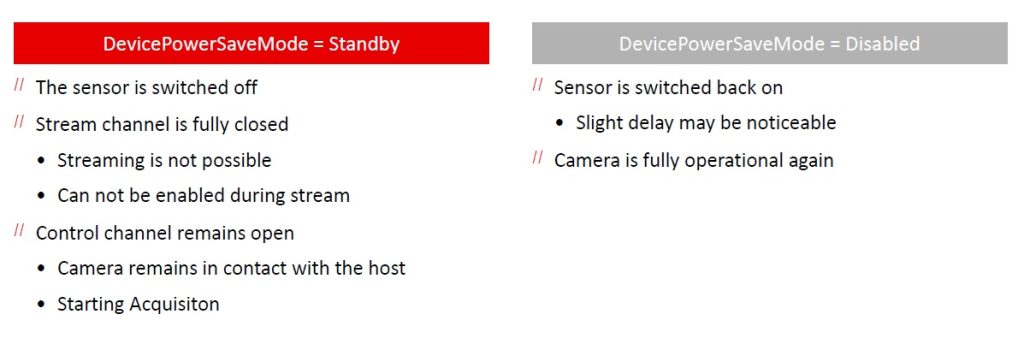
- Power saving standby mode – heat minimization for embedded designs
- Improved recovery from over-temperature power savings mode – automated recovery
- More GenICam features for V4L2 Video for Linux – great to have Linux options
- Additional registers and controls – if some DRA is good, more is better
… especially for the Alvium camera families, including USB3 and MIPI CSI-2, and 1 GigE and 5 GigE models.
Call us at 978-474-0044 to speak to one of our experienced sales engineers. Or tell us what you’d like to know more about – whether concepts, features, or pricing – and we’ll get back to you:

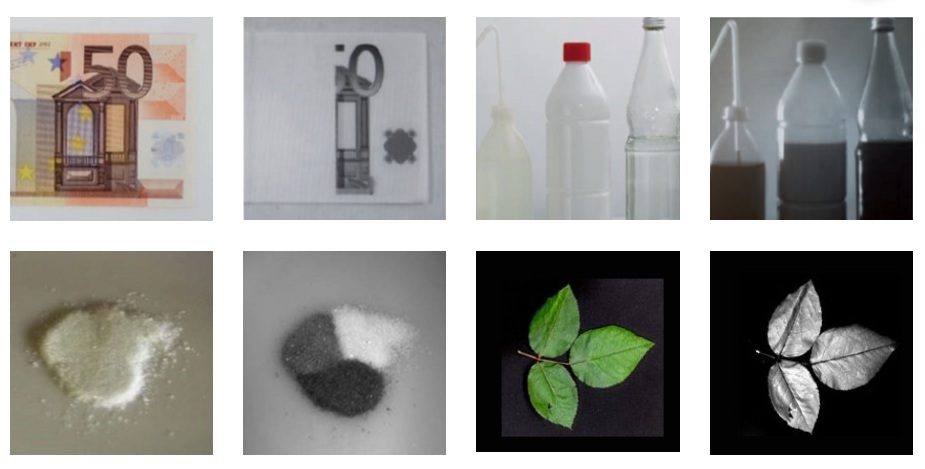
Liquid Lens Autofocus Controls
If you’re new to liquid lenses, see our prior blog for examples and an overview. Liquid lenses can change focus within milliseconds, far faster than mechanical apertures.
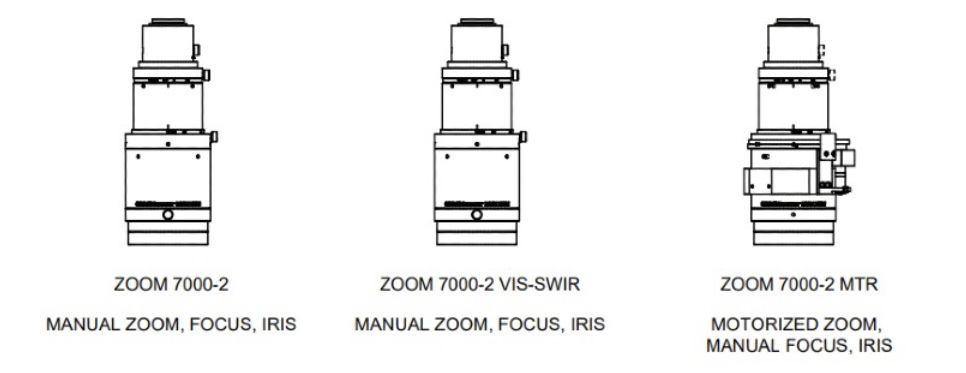
Below you can see the hardware configuration, which new new autofocus controls can utilize.
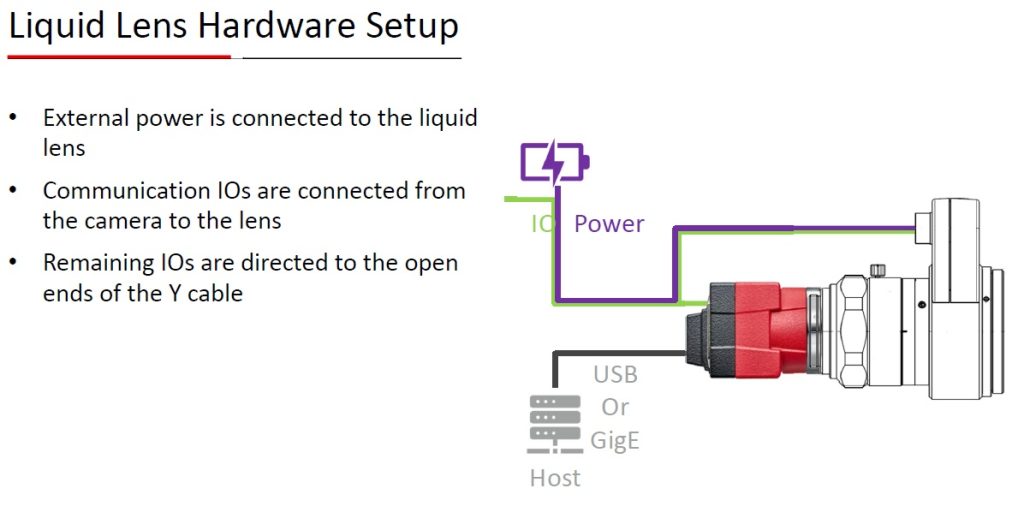
So AVT provides the lens controlling capability on the camera side, and you can optionally connect a liquid lens if that would help your application. Naturally AVT Alvium cameras may also be used with conventional lenses, including S, CS, C, closed, open, and bare-board – range of options varies slightly by model. Please review when ordering or confer with us per adage “measure twice cut once”.
Power saving standby mode
There are at least to reasons why you might be interested in power savings. The layman’s view might be to preserve the environment or save on energy costs. But compact sensors and cameras don’t use a lot of power, often just +/- 1 watt. The primary motivator, for embedded systems designers, is to reduce heat, during periods when no imaging is required. That in turn enhances image quality and prolongs system life.
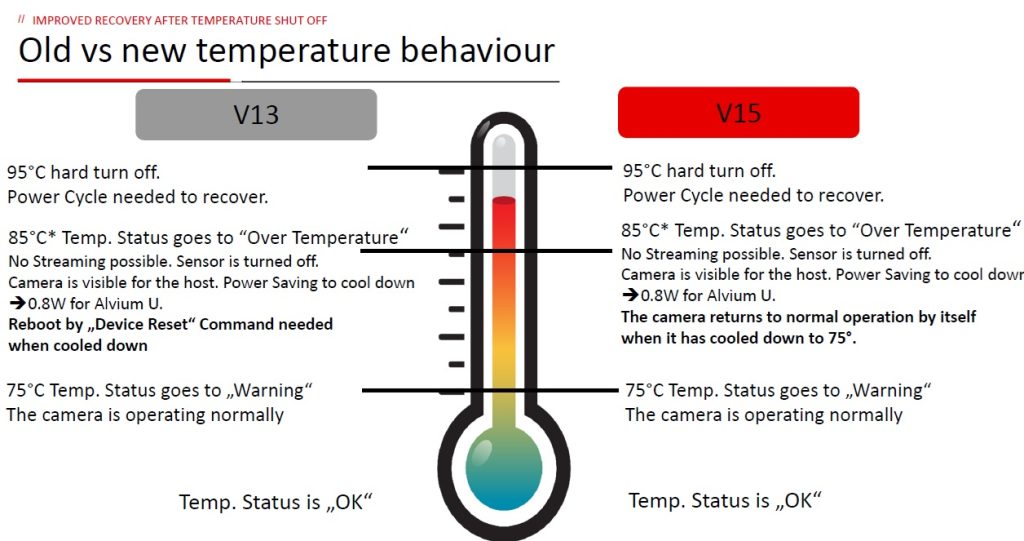
Improved Recovery from over temperature mode
When the camera goes into over temperature mode, it automatically stops power draw as a self-protection mechanism. In firmware V13 this required a camera reboot to resume imaging. Now in V15 the camera resumes normal function without requiring reboot.
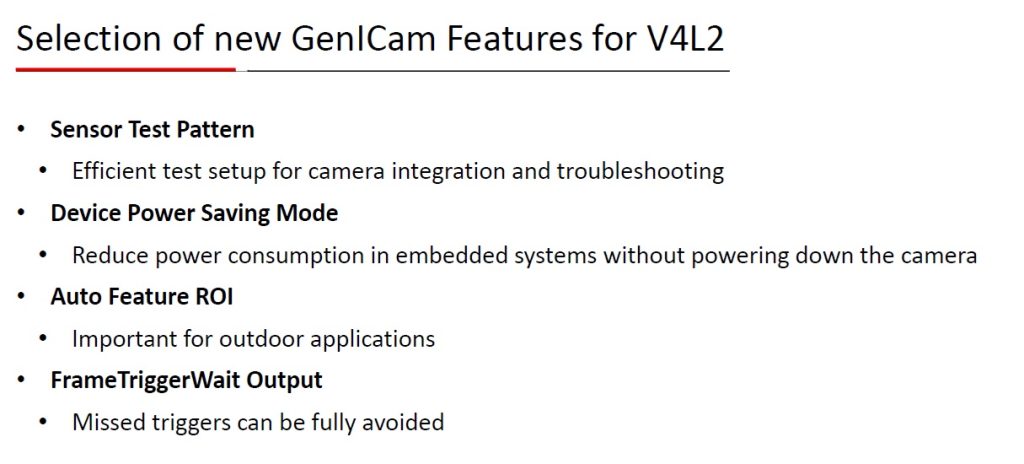
(More) GenICam features for V4L2 Video for Linux
If you favor video for Linux (V4L2) drivers and APIs for your development and production controls, below see GenICam features now available to you.
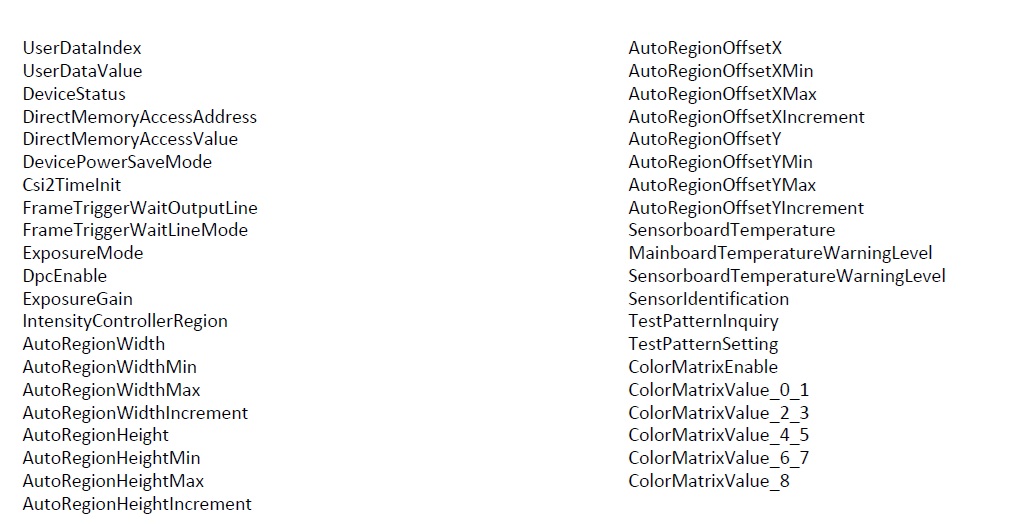
Additional Registers and Controls
In addition to all the registers previously available on Alvium’s MIPI CSI-2 cameras, below are a number of new registers, whose names suggest their meaning and use. One may control each feature through any of GenICam APIs, V4L2 Video for Linux, or by Direct Register Access (DRA) memory addressing. Whichever method you prefer.
Manuals for all AVT cameras and SDKs are downloadable, of course. Drill in on any feature or attribute of interest.

1st Vision’s sales engineers have over 100 years of combined experience to assist in your camera and components selection. With a large portfolio of cameras, lenses, cables, NIC cards and industrial computers, we can provide a full vision solution!
About you: We want to hear from you! We’ve built our brand on our know-how and like to educate the marketplace on imaging technology topics… What would you like to hear about?… Drop a line to info@1stvision.com with what topics you’d like to know more about.