Coming soon – Goldeye Pro models with the TEC-version of Sony’s IMX992/993 SenSWIR sensors – tuned to 400nm – 1,700nm. We previously covered these sensors in Allied Vision’s compact uncooled Alvium cameras. Now Allied Vision brings these sensors to the Goldeye Pro lineup, with two important features: Thermoelectric cooling (TEC) and 5GigE interface.
1. Thermoelectric cooling (TEC)
Image quality is enhanced by thermoelectric cooling (TEC). Often paired with InGaAs sensors common in SWIR imaging cameras, Allied Vision now brings TEC to these CMOS Sony sensors. Why? Because cooling reduces thermal noise, creating a higher signal-to-noise ratio.
2. Fast 5GigE interface – framerates to 150fps
With the 5GigE interface, these SenSWIR cameras deliver frame rates above 100fps:

But first, how about those SWIR images?
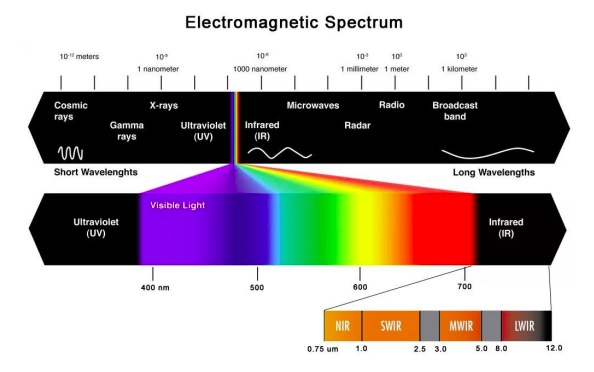
More about the new camera models in a moment, but first a reminder about SWIR. Short-wave infrared imaging enables machine vision applications beyond the visible portion of the spectrum.
Example applications
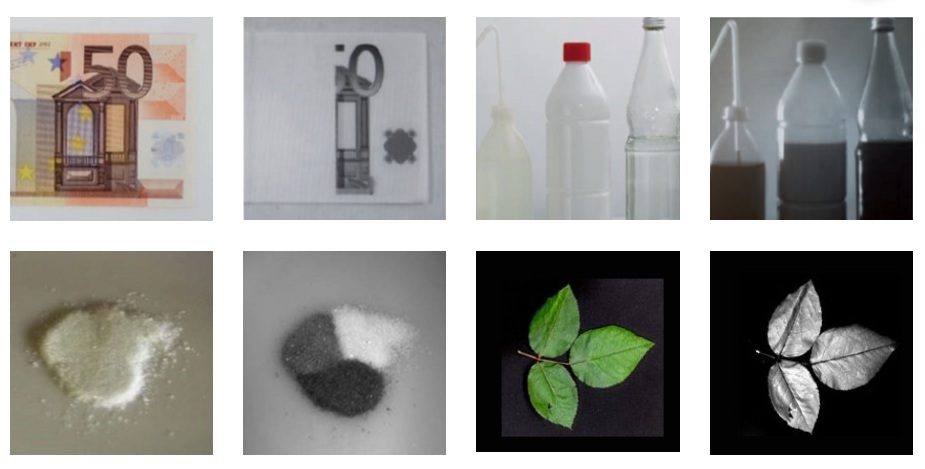
Per those striking image pairs at the top of the article, consider briefly:
- Banknote validation: The SWIR application detects features unseen in the visible spectrum
- Fluid fill levels: Able to see through even opaque plastic bottles, SWIR can monitor and control fill levels.
- Materials detection: Whether for security or quality-control, many materials emit/reflect distinctly in the SWIR range, despite appearing identical under visible light.
- Agriculture: Crop monitoring and irrigation applications are enabled by SWIR, which can detect moisture unseen by visible light. Fruit-sorting applications are also supported.
Back to the future
SWIR imaging isn’t new, but commercially it’s growing by leaps and bounds at present. Allied Vision has been an innovator and leader in SWIR for some time, and continues to expand their portfolio of SWIR cameras. While Allied Vision also offers SWIR capabilities in their compact Alvium models (with USB3, MIPI CSI-2, and GigE interfaces), their flagship SWIR offerings are found in the Goldeye product families.
The comprehensive Goldeye offering includes sensors that cover SWIR, XSWIR, and VSWIR portions of the spectrum. Some models are uncooled, while others provide cooling. You may know exactly what your application requires. Or you might appreciate our guidance.

More about Goldeye Pro 5GigE cameras
Noteworthy features include:
On-board automatic image correction
Stabilized sensor cooling without a fan
Lockable cable connectors
Power over Ethernet (PoE)
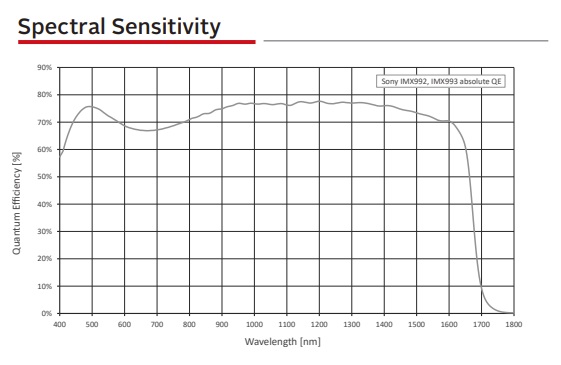
Spectral sensitivity
For full details…
This article was intended as a short overview of the new Goldeye Pro SWIR 5GigE cameras. See all Allied Vision Goldeye SWIR cameras, and Alvium SWIR cameras, including datasheets and comprehensive attributes. There are many choices now in SWIR, VSWIR, and XSWIR imaging. Tell us more about your application and we’ll be happy to advise.

1st Vision’s sales engineers have over 100 years of combined experience to assist in your camera and components selection. With a large portfolio of cameras, lenses, cables, NIC cards and industrial computers, we can provide a full vision solution!
About you: We want to hear from you! We’ve built our brand on our know-how and like to educate the marketplace on imaging technology topics… What would you like to hear about?… Drop a line to info@1stvision.com with what topics you’d like to know more about.