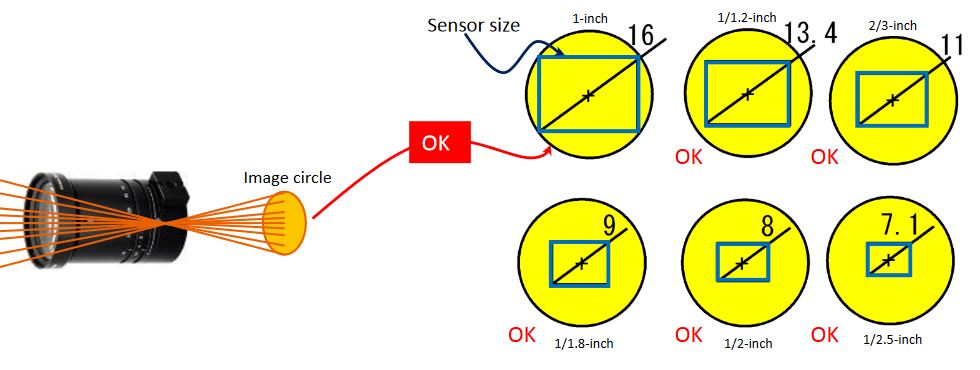
If you have been following Sony’s new IMX image sensor product line, their newest sensors are based on a 3.65um pixel pitch. However, when you scale this up to their new 12MP sensor (Sony Pregius IMX253, IMX304), the sensor size becomes 1.1” (17.6mm diagonal) format. A 1” lens format will not cover this image circle and in turn has vignetting in your image (Read our blog post on sensor size vs. lens size ) .
One possible solution is to use a 1” lens and vignette 5% on each side, or use a 1” lens and stop it down where the vignetting goes away. However this is not an optimal solution. A second solution is to use a F Mount lens, but if the camera is a C mount, you will need a C to F adapter, again less than ideal.
Fortunately there are some C mount lenses that are greater than a 1” image format. Kowa and Schneider both have been shipping 4/3” format lenses, although these are quite expensive. Recently, Computar has come out with a line of 1.1” format lenses SPECIFICALLY for this sensor!
Key Features of the 1.1″ format, Computar MPY 12MP C-mount lenses
1st Vision’s sales engineers specialize in industrial imaging and can help you in the lens selection. Additionally, they can help ensure you have the best lens mated to the newer sensors to ensure the highest contrast.
Common lens questions we are often asked are, “What is a lens’s optical format (or size; we will use the two interchangeably) and how does it relate to specific image sensor sizes in industrial cameras? Along with, “Can any size machine vision camera be used on any lens format or do they need to be matched exactly?”
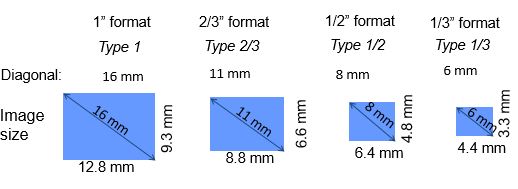
First lets review the sizes of the machine vision camera image sensors themselves (as seen below).
Image sensor sizes given in ” vs. true diagonal size in mm
The image sensor size is typically put in terms of “inches”, but really has nothing to do with this and dates back to the “image tube” days. Without a big history lesson, a sensor that fit into an image tube with a 1” (inch) yoke was deemed a 1” image format . Today, we still use these terms and see commons sizes stated as 1/3”, ½”, 2/3” as seen in the image above. Note: The image size in ” does NOT calculate to mm and vice versa! It is nomenclature only.
However, what is important is to look at the diagonal across the given image sensor which is the “image circle”. (i.e The 1/3” format above has a diagonal of 6 mm. )
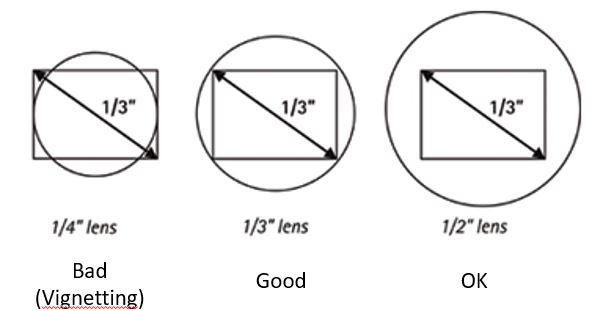
The size of the lens MUST be equal or greater than the size of the sensor ( circle size that covers the sensor) or you simply will not get the whole image!
Lens optical format (circle) vs sensor size (rectangle)
The diagram above shows a 1/3″ format image sensor (6mm diagonal). In order to adequately cover the image sensor, you need a 1/3″ lens format or larger. On the left, we show a lens with a 1/4″ format, and it does not cover the sensor.
Optical Vignetting
The end results from the improper mating of a smaller lens format than the image sensor format will be vignetting (dark corners where the lens does not cover the sensor) of the image.
What can I do when there is no specific lens format matching the image sensor format?
Lens manufacturers are continuing to design lenses to address the changing sensor market. However you will not always find a specific size format to match the lens. In these cases, you just need to ensure the lens format (image circle diameter) is larger than the sensor as mentioned in the above example.
An example is the newer 1/1.2” sensor sizes (IMX174, IMX249 ) which have a diagonal of 13.4mm. Although there are some lens manufacturers that designed a lens with the specific 1/1.2” format, there are not many. Referring to lens format diagram, the 1/1.2” format is between a 2/3” and 1” format. The 2/3” format has a image circle of 11 mm which will not fully cover the 1/1.2” format (13.4mm diagonal), and you will get vignetting of the image. The solution is to use the next size up which is a 1” format. This format is commonly found in many lens manufacturers, in turn providing many lens manufacturers to choose from.
In conclusion, you can use an image format on a lens on smaller image sensor size, but not the other way!.. You’ll have vignetting and lose part of your image!
What else do we need to consider in lens selection?
This blog post simply covers sensor formats vs sensor sizes. There is much more to consider in a lens selection such as resolution of the lens to resolve the pixels themselves, what focal length is needed etc.
Here are some further resources to help in the selection process. Additionally, 1st Vision has over 100 years of combined experience in industrial imaging in which you can contact us to aid in the section.
For many years 1stVision has offered several lines of OEM machine vision lenses. These lenses are ‘unbranded’ but they are made with the glass of one of the big three Japanese optical manufacturers.
1st Vision lenses have excellent optical performance for a great price currently offering a product line designed for a 2/3” image formats with 2MP and 3MP resolutions.
Advantages The OEM machine vision lenses offer some distinct advantages:
They are less expensive than similarly performing ‘branded’ lenses
When designed into instruments for resale, all issues come back to the original manufacturer. The end user cannot bypass the manufacturer, ensuring you, when your users have problems, you know about them!
With a good price point, the 1″ format can be used for all smaller sensor sizes using the “sweet spot” of the lens!
What’s new? OEM 1” Optical format machine vision lens.
Recently, 1stVision have begun offering a new OEM line of 1” format, high performing 2 and 3 MP lenses, which offers all the above advantages, but you can now use it with the new Sony Pregius and On Semi Python sensors that require lens optical formats greater than 2/3” (For example the Sony Pregius 2MP ( IMX 174, IMX249 ), 8.9MP ( IMX267, IMX255 ) and ON-SEMI 5MP Python 5000 sensors ) Search on the image sensors here
1st Vision maybe a distributor, but we are really your value-added vision consultants! With combined experience of over 100 years, we can help discuss the optical performance, how it relates to your image sensor and help you in the design process. Please contact us to start a conversation
Optotune lenses solve a machine vision industry problem!
IDS Imaging camera with Optotune lens
so
Machine Vision applications requiring the inspection of objects at various heights can become a challenge as normal lens have limited depth of field. Objects outside of the depth of field become out of focus, limiting the vision application. Historically, a lens with motorized focus adjustment would be implemented adding complexity, cost and long cycle times. In reality, this challenge is applicable to any imaging application requiring refocusing due to various lens working distances.
Optotune Focus tuneable lenses solves this problem eliminating motorized zoom lenses or manual intervention.
Adding an Optotune tunable liquid lens to the optical system on a standard C-mount lens and camera, allows refocusing of the imaging system on the fly. When used in conjunction with distance sensors, its possible to inspect objects of various heights, refocusing within 15 milli-seconds.
For example, vision systems using 8mm to 50mm focal length lenses can be equipped with a tuneable lens in the front, typically mounted on the filter thread. In this configuration it is possible to focus from infinity down to about 100mm or less if spacers are added.
This solution can be applied to industrial machine vision applications, ophthalmology, laser, microscopy, postal, packaging and laser applications to name a few.
Optotune’s focus tunable lenses are shape-changing lenses based on a combination of optical fluids and a polymer membrane. The core element consists of a container, which is filled with an optical liquid and sealed off with a thin, elastic polymer membrane. A circular ring that pushes onto the center of the membrane shapes the tunable lens. The deflection of the membrane and with that the radius of the lens can be changed by pushing the ring towards the membrane or by exerting a pressure to the outer part of the membrane or by pumping liquid into or out of the container.
Watch this video to see the Optotune liquid lens in action
Advantages
A change in lens radius of several micrometers can have the same optical effect as moving the entire lens several centimeters. In turn there are several advantages
Optical systems can be designed more compact, oftentimes with less lenses and usually with less or no translational movement.
Large working distance ranges can be achieved
Eliminate expensive mechanical actuators resulting in a more robust design, which can be completely closed so that no dust can enter. Essentially no moving parts for long life cycles (> 1B cycles)
Weight and volume is reduced in the system.
Low power consumption.
Fast response time of systems, down to the order of milliseconds.



 Individual Specifications can be found via this link for the models below:
Individual Specifications can be found via this link for the models below: 



 For many years
For many years